自律走行ロボット(AMR)Autonomous Mobile Robot
無人搬送車(AGV)Automatic Guided Vehicle
マキテックは製造工場、物流倉庫の省人化・無人化において、一貫したプランを提案させていただいております。
新開発のAMRは最新のナビゲーション技術を搭載し、高速で確実、更に柔軟な対応が可能となりました。
この協働ロボットと弊社の培ってきた搬送技術で、多岐にわたるニーズにお応えしてまいります。
新開発のAMRは最新のナビゲーション技術を搭載し、高速で確実、更に柔軟な対応が可能となりました。
この協働ロボットと弊社の培ってきた搬送技術で、多岐にわたるニーズにお応えしてまいります。
自走走行ロボット(AMR)

型式
Robot-VAMR/AGV
|
100積載荷重(kg)
|
- |
CV仕様
|
CV:コンベヤ
RBT:ロボット
RBP:ロールボックスパレット
P:パレット
K:牽引
特長
●自律走行
2DSLAM方式採用によりレイアウト変更が容易!
日々変わる保管エリアにも柔軟に対応します。
●多種多様な積載に対応
500シリーズは既存のカゴ車をブレーキをかけたまま運搬可能!他シリーズもケースから金型まで対応可能。
●無人化できる
他の設備との連動で入庫出庫の無人化を実現!夜間作業を自動化することによりコスト削減を実現します。
●高精度な停止位置精度
制御ソフトは、ナビトロールを採用し、停止位置精度±1㎝を実現しており精度を求める場所にも導入可能!
●複数台制御可能
最大100台までコントロール可能なAMR複数台管理ソフトを準備しました。
●レールレス
磁気レールが無いから施工が早い!走行経路変更も工事がいりません。
●24時間稼働が可能
非接触自動充電(オプション)を採用することにより長時間稼働が可能になりました!

AMR 制御用ソフトウェア
Navitrol AGVナビゲーション
■Navitrolの代表的な機能
環境マップ作成と自律走行ナビゲーション
様々なタイプのAMRに対応
障害物回避
パレット検知
リフトテーブル/フォークの制御も可能
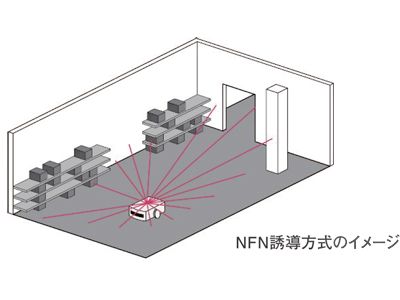
Navitrol(ナビトロール)はAMRの自律走行を可能にするソフトウェアです。
AMRや無人フォークリフトに搭載し、SLAM技術をベースとしたNFN方式でのナビゲーションを行います。刻々と変化する環境の中でも自己位置をロストすることなく安定的に走行が可能です。また、環境地図作成やルート設定も容易に行うことができ、AMR導入のリードタイムを短縮します。
2D-SLAM
従来の2D-SLAMによるAMRは、いずれも自己位置推定精度は±3~5㎝が限界となっており、装置へのワーク供給など精密な位置合わせ用途には不十分でした。このため、部分的に追加のターゲットマーカー設置が必要でした。これに対し、Navitrolは2D-SLAMのみで停止位置精度±1㎝を実現しました。
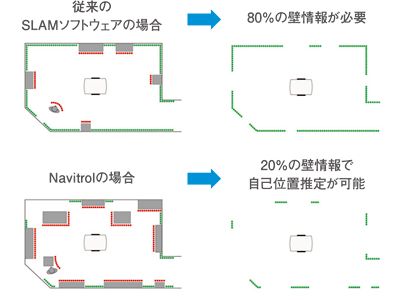
ダイナミックマッピング
資材や機材が置かれた工場や倉庫内でも限られた壁面情報をもとに自己位置を推定可能です。刻々と変化する環境情報に惑わされることなく安定的な自己位置推定を実現します。
ルート設定
実際のマップ情報を取得するためにタブレットによる手動操作でAMRを走らせ壁情報を取得します。

ナビトロール画面で実際の走行ルートを書き込みAMRに情報を通信すると走行が可能となります。
Robot-Vシリーズ 2D-SLAM方式
自律走行ロボットは、AMR(Autonomous Mobile Robot)とも呼ばれ、「人協調型自律移動ロボット」という意味でタブレット等からの指令で自由に移動ができるロボットです。多彩なニーズに対応し最適なシステムを提案します。
標準以外の仕様も製作いたしておりますのでご相談ください。


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-V100-CV |
|---|---|
| 搬送重量 | 100㎏ |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 40m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 800㎜ |
| 全幅 | 600㎜ |
| 全高 | 350㎜ |
| 自重 | 100㎏ |


仕様
※当社カゴ車タイプMJR-3に対応
※()寸法はMJR-5に対応
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-V500-RBP |
|---|---|
| 搬送重量 | 500㎏ |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 40m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 1750㎜ |
| 全幅 | 450㎜(700) |
| 全高 | 195㎜(185) |
| 自重 | 140㎏(175) |
※()寸法はMJR-5に対応
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-VL600-RBP |
|---|---|
| 搬送重量 | 600Kg(リフトアップ) |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 35m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 1570㎜ |
| 全幅 | 670㎜ |
| 全高 | 195㎜ |
| 自重 | 380㎏ |


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-V1000-P |
|---|---|
| 搬送重量 | 1000㎏(リフトアップ) |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 35m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 1600㎜ |
| 全幅 | 800㎜ |
| 全高 | 330㎜ |
| 自重 | 560㎏ |


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-VL1000-P |
|---|---|
| 搬送重量 | 1000㎏(リフトアップ) |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 35m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 1850㎜ |
| 全幅 | 800㎜ |
| 全高 | 260㎜ |
| 自重 | 570㎏ |


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-V2000-K |
|---|---|
| 搬送重量 | 2000㎏(牽引) |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 35m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 1300㎜ |
| 全幅 | 700㎜ |
| 全高 | 610㎜ |
| 自重 | 560㎏ |


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-V5000 |
|---|---|
| 搬送重量 | 5000㎏ |
| 誘導方式 | 2D-SLAM |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/回転 |
| 走行速度 | 30m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 3500㎜ |
| 全幅 | 1900㎜ |
| 全高 | 600㎜ |
| 自重 | 2500㎏ |


仕様
※非接触充電の場合は国内電波法対象となり高周波利用設備許可申請が必要です。
| 型式 | Robot-VL100-RBT |
|---|---|
| 搬送重量 | 100㎏ |
| 誘導方式 | NFN方式(2D-SLAM) |
| 操舵方式 | 2輪速度差方式 |
| 走行方向 | 前進/後進/スピンターン |
| 走行速度 | 35m/min |
| バッテリー | リチウムイオンバッテリー |
| 充電方式 | 接触充電・非接触充電(自動) |
| 全長 | 1500㎜ |
| 全幅 | 800㎜ |
| 全高 | 1874㎜ |
| 自重 | 300㎏ |
搬送システム製品
物流機器
建設関連事業
福祉・介護製品
お客様サポート